|
|

|

|
| e-Pub |
Section: New Results
Physically-Based Simulation and Haptic Feedback
Physically-based simulation
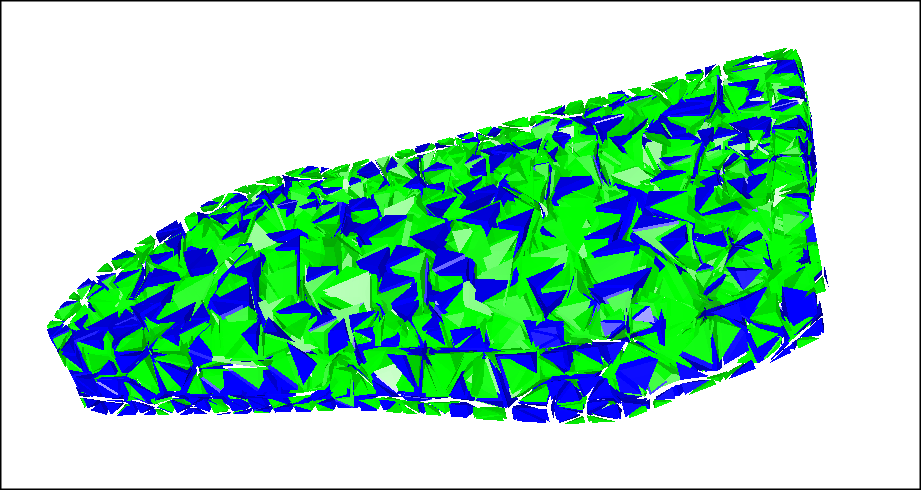
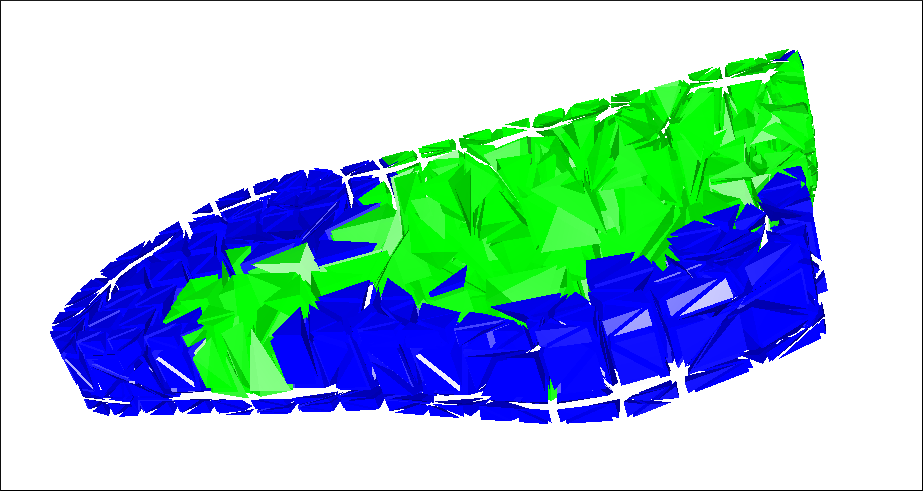
Elasticity-based Clustering for Haptic Interaction with Multi-Resolution Heterogeneous Deformable Objects
Participants: Benoît Le Gouis, Maud Marchal, Bruno Arnaldi and Anatole Lécuyer
Physically-based simulation of heterogeneous objects remains a strong computational challenge for many VR applications, especially when involving haptic interaction. In [18], we introduced a novel physically-based multi-resolution approach for haptic interaction with heterogeneous deformable objects. Our method called "Elasticity-based Clustering" is based on the clustering and aggregation of elasticity inside an object, so to create large homogeneous volumes preserving important features of the initial repartition. Such a creation of large and homogeneous volumes simplifies the attribution of elasticity to the elements of the coarser geometry. We could successfully implement and test our approach within a complete and real-time haptic interaction pipeline compatible with consumer-grade haptic devices. We evaluated the performance of our approach on a large set of elasticity configurations using a perception-based quality criterion. Our results show that for 90% of studied cases our method can achieve a 6 times speedup in the simulation time with no theoretical perceptual difference.
|
Real-time Target Tracking of Soft Tissues in 3D Ultrasound Images Based on Robust Visual Information and Mechanical Simulation
Participants: Maud Marchal
In [9], we presented a real-time approach that allows tracking deformable structures in 3D ultrasound sequences. Our method consists in obtaining the target displacements by combining robust dense motion estimation and mechanical model simulation. We performed evaluation of our method through simulated data, phantom data, and real-data. Results demonstrated that this novel approach has the advantage of providing correct motion estimation regarding different ultrasound shortcomings including speckle noise, large shadows and ultrasound gain variation. Furthermore, we could show the good performance of our method with respect to state-of-the-art techniques by testing on the 3D databases provided by MICCAI CLUST'14 and CLUST'15 challenges.
This work was done in collaboration with Lagadic team and IRT B-Com.
Haptic feedback
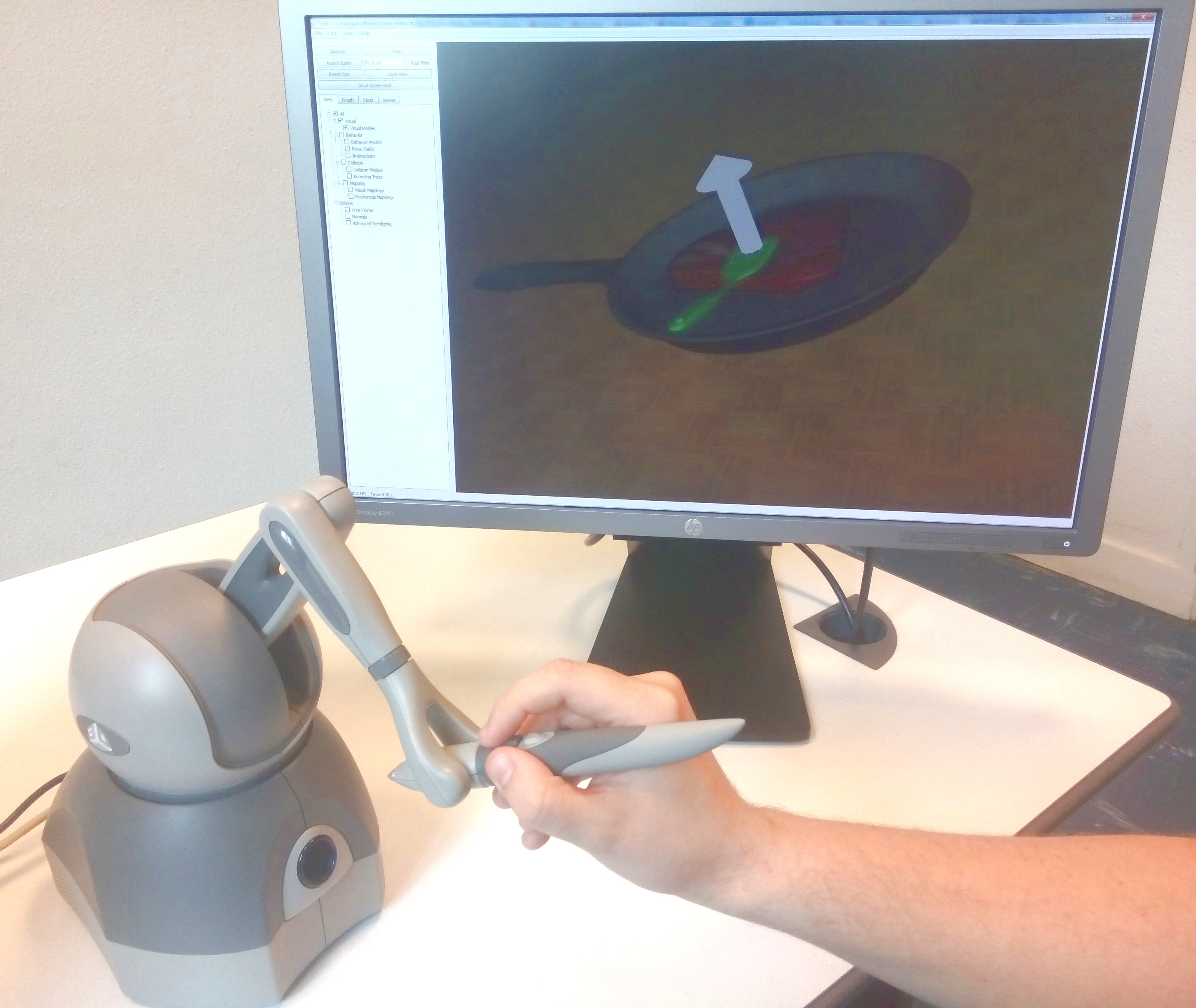
Haptic Rendering of FEM-based Tearing Simulation using Clusterized Collision Detection
Participants: Benoît Le Gouis, François Lehericey, Maud Marchal, Valérie Gouranton, Bruno Arnaldi and Anatole Lécuyer
Haptic rendering of deformable phenomena remains computationally-demanding, especially when topology modifications are simulated. Within this context, the haptic rendering of tearing phenomena is under-explored as of today. In [17] we proposed a fully-functional interaction pipeline for physically-based simulation of deformable surface tearing allowing to reach haptic interactive rates. It relies on a high efficiency collision detection algorithm for deformable surface meshes, combined with an efficient FEM-based simulation of deformable surfaces enabling tearing process. We especially introduced a novel formulation based on clusters for the collision detection to improve computation time performances. Our approach was illustrated through interactive use-cases of tearing phenomena with haptic feedback, showing its ability to handle realistic rendering of deformable surface tearing on consumer-grade haptic devices.
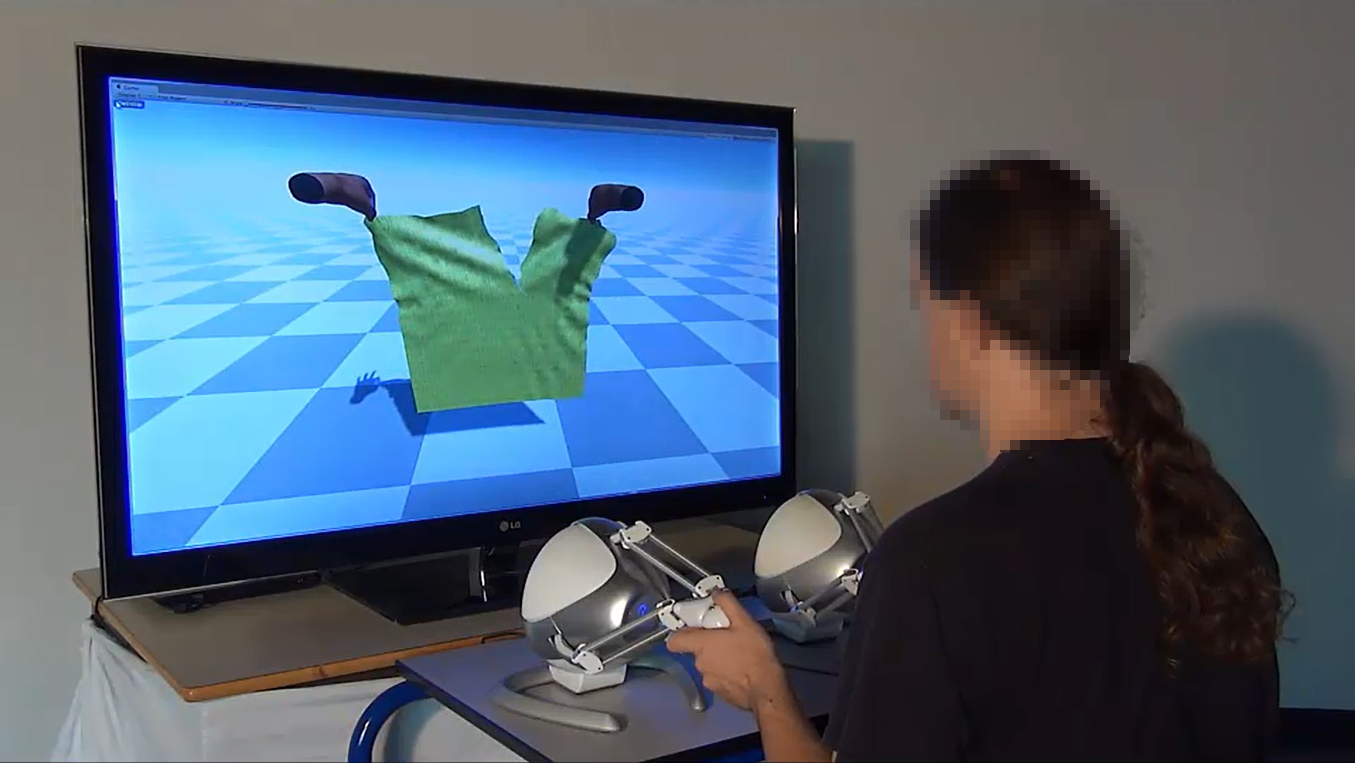
FlexiFingers: Multi-Finger Interaction in VR Combining Passive Haptics and Pseudo-Haptics
Participants: Maud Marchal, Benoît Le Gouis, Ferran Argelaguet and Anatole Lécuyer
3D interaction in virtual reality often requires to manipulate and feel virtual objects with our fingers. Although existing haptic interfaces can be used for this purpose (e.g. force-feedback exoskeleton gloves), they are still bulky and expensive. We introduced a novel multi-finger device called "FlexiFingers" that constrains each digit individually and produces elastic forcefeedback [10]. FlexiFingers leverages passive haptics in order to offer a lightweight, modular, and affordable alternative to active devices. Moreover, we combined Flexifingers with a pseudo-haptic approach that simulates different levels of stiffness when interacting with virtual objects. We illustrated how this combination of passive haptics and pseudo-haptics could benefit multi-finger interaction through several use cases related to music learning and medical training. These examples suggest that our approach could find applications in various domains that require an accessible and portable way of providing haptic feedback to the fingers.
